




Slip Ring Torque: What Engineers Need to Know
BY NBG
 2026-03-31
2026-03-31
VIEWS: 654

Slip Ring Torque: What Engineers Need to Know
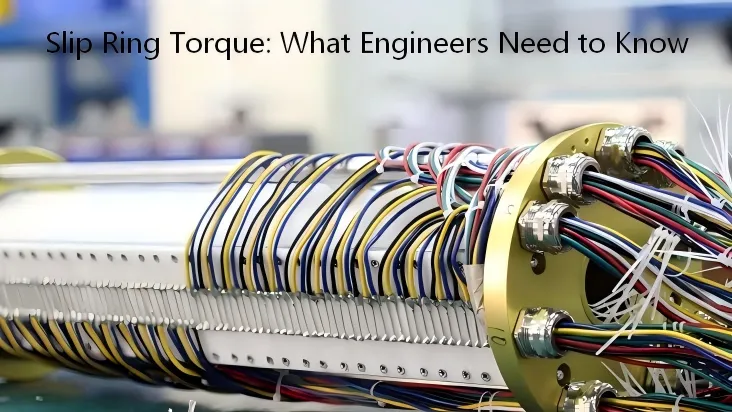
People often get slip ring torque wrong because the word "torque" can mean two very different things in engineering. In most slip-ring discussions, the term refers to the friction torque generated by the brush-to-ring contact interface and the internal bearing system. It is the resistive rotational drag that the drive system must overcome during operation. It is not the motor's output torque. This article discusses slip-ring friction torque, the different types of torque engineers should use, where torque is most important, and how to control it in real life.
What is Slip Ring Friction Torque?
One of the most important mechanical performance indicators of a slip ring is friction torque. It is closely related to electrical parameters such as contact resistance, current rating, and signal bandwidth, but it doesn't always get as much attention when specifications are being set. That can be a mistake in real life. A slip ring with the wrong torque characteristics can make the servo respond slowly, use more power, cause uneven rotation, and speed up wear. Because of this, friction torque should be considered a design variable rather than a minor detail in a catalog.
Startup (Static) Torque vs. Dynamic (Running) Torque
The drive system usually has to handle the most torque at startup. It includes static friction between the brush and the ring, as well as within the bearing system. This initial resistance is higher than the torque needed once the system starts to move because nothing is moving yet.
Dynamic torque is the torque that resists motion when something is in continuous motion. When the slip ring starts turning, the friction usually decreases and stays the same. The brush and ring surfaces wear into each other during the run-in period, which makes the real contact area more even and the dynamic friction coefficient more stable. Engineers need to consider both starting and running torque when sizing motors, drives, and motion control systems, since starting torque is about 1.3 times running torque in many systems.
Key Variables That Determine Friction Torque
Several design factors influence friction torque. Using a brush is one of the easiest ways to determine how much pressure is being applied at the brush contact. Increasing preload on the spring increases the contact force, thereby increasing the friction torque. The number of circuits is also important because more rings mean more brush force acting on the rotating assembly.
The ring's size also affects torque. With the same friction coefficient, a larger diameter increases the moment arm, so you need more torque to turn the unit. The bearing system has its own effect. Preloaded bearings, sealed bearings, and designs with robust protection tend to have higher free-state torque. The lubricant's viscosity also contributes to drag, especially in designs where the grease changes over time or at low temperatures. The way carbon-graphite, silver-graphite, and gold-on-gold systems work is different, and even small changes in surface roughness can alter friction stability.
Torque Categories Engineers Must Specify
When writing a specification or asking for a quote, you should not just give a single generic value for torque. Instead, you should give it for a range of operating conditions. It helps keep you from picking a slip ring that works well electrically but not mechanically, or under-specifying the drive system.
Free-State Torque
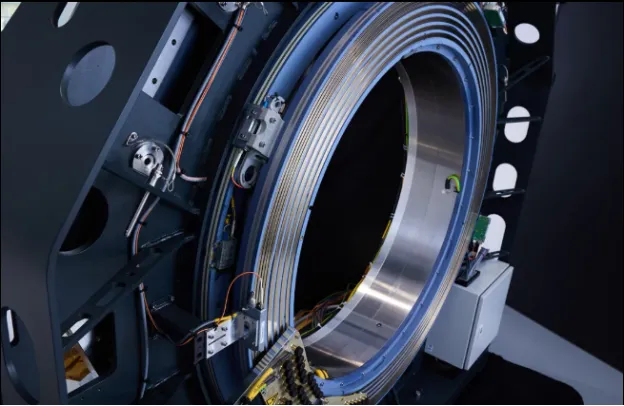
Before any outside mechanical load is added, the slip ring or bearing assembly's free-state torque is the friction torque. This baseline drag is most important in precision systems such as medical robotics, semiconductor equipment, and optical platforms, where even a small amount of extra resistance can affect a servo's accuracy or the smoothness of its motion. Manufacturers often keep track of this value, and it tends to be higher in designs with stronger bearing preload or more aggressive sealing.
Load Friction Torque
When you apply axial, radial, or moment loading, the friction torque increases. This is especially important for large-bore, pancake, and heavy-duty assemblies that are used in radar pedestals, cranes, and wind systems. A standard way to talk about average running torque is:
Tᵣ = µ × k × F × Dₗ
The final torque value is based on the friction coefficient, the load, and the load diameter.
Total Drive Torque Requirement
The total drive requirement is the sum of free-state torque, load friction torque, and other external forces such as wind loading, gravity, seal drag, and acceleration inertia. In practice, engineers usually apply a safety factor when sizing a drive system. That margin is more important when the structure is flexible, the application experiences shock loading, or the torque budget must account for long-term wear.
Torque-Sensitive Applications — Why Getting It Wrong Matters
Not all applications require the same amount of slip-ring friction torque. In some systems, it is a small loss of mechanical energy. In some cases, it directly affects the accuracy, smoothness, or validity of a measurement.
Medical Imaging (CT Scanners)
The slip rings in a spiral CT are typically mounted on the CT rotor. While the slip rings themselves are not part of the bearing assembly, the rotor as a whole is supported and rotated by the main slewing bearing. The additional resistance generated by friction between the slip rings and the carbon brushes affects the slip ring starting torque. The carbon brush pressure must strike a balance between the contact force required to ensure good electrical contact and the need to avoid excessive noise, increased wear, and reduced service life caused by excessive pressure.
Torque Measurement Applications
Engineers should also keep a second torque-related use case separate from friction torque. In rotary torque transducers, slip rings serve as the signal path for transmitting strain-gauge data from a rotating shaft to stationary data-acquisition hardware. The slip ring itself should not cause any significant mechanical disturbance in these systems. The torque it creates must be very small compared to the measured torque range. Otherwise, the measurement accuracy could be affected.
Engineering Strategies to Minimize or Control Friction Torque
The first step to reducing friction torque is making the right design choices. The goal isn't always to get the lowest torque possible. Instead, it's to find the right balance between electrical reliability, wear life, and mechanical drag.
Contact Technology Selection
Contact technology is one of the main tools. Carbon and graphite brushes have moderate friction and can self-lubricate, making them good for industrial slip rings that carry a lot of current. Gold wire on a gold track is better for low-torque precision and signal applications because it reduces friction and maintains stable contact resistance. Silver-graphite composites are in the middle and work well for medium-duty tasks. Mercury-wetted contacts can offer very low friction in applications where torque is critical, but they can only be used in certain types of applications and operating conditions.
Bearing System Optimization
Torque is also greatly affected by the bearing you choose. When there isn't much drag, precision ball bearings with little preload are usually the best choice. Over-sealed bearings can help protect things, but they also make the seal harder to move, which may not be good in systems where torque is important. Ceramic hybrid bearings can reduce friction even further, especially when speed and heat performance are important.
Brush Spring Design and Maintenance
The spring force is usually the easiest thing to change. If the spring force is too weak, the contact becomes unstable. If it is too high, both friction torque and wear go up. A good run-in process helps reduce startup torque and stabilize the unit's running behavior before it goes into service. Taking care of things is also important. Regularly checking the brushes prevents torque from increasing as the contact condition changes due to worn brush geometry, dirt, or weakened spring behavior.
Torque Specification Checklist for Engineers
A clear torque specification should include more than just one maximum value. Engineers should specify the maximum starting torque and the maximum running torque at the rated speed. The number of circuits should be included because the brush force increases with the number of channels. It's also important to know the bore size and ring diameter, especially in larger assemblies where moment-arm effects are significant.
The bearing type and preload level should be part of the requirements, as they significantly affect free-state torque. When choosing a contact material, consider torque, signal stability, life, and maintenance. You should also include factors such as temperature, humidity, and contamination, as they affect friction throughout the unit's life.
Conclusion
The torque of a slip ring is a mechanical performance parameter affected by factors such as brush contact mechanics, bearing preload, ring size, lubrication, and material pairing. Engineers also need to know the difference between two situations: the torque generated by the slip ring itself and the torque measured by a slip ring in transducer systems. In both cases, it's important to get the specification right. The best approach is to request torque data, clearly define both starting and running torque, and include the total drive torque requirements in every slip ring specification from the outset.
NBG Innovations Group Pte.Ltd.
#13-13A, International Plaza, 10 Anson Road, Singapore (079903)


Navigation
 HomeSustainable
HomeSustainableProduct

NBG
INVITATION